|
|
| . |
|
MEIMotorEncoderSsiConfig Definition
Description MEIMotorEncoderSsiConfig contains configurations for SSI (Synchronous-Serial Interface) feedback devices. Use this structure to configure the SSI when the MEIMotorEncoderType is configured for MEIMotorEncoderTypeSSI. Be sure to verify that the SynqNet node FPGA supports SSI feedback devices. See the Node FPGA Images: Features Table.
Sample Code Configure the motor’s primary feedback for an RMB by using motor I/O index 0 (MEIMotorIoConfigIndex0) to drive the clock output at 500 kHz. The serial input is decoded via the encoder input channel A (MEIMotorSsiInputENC_A).
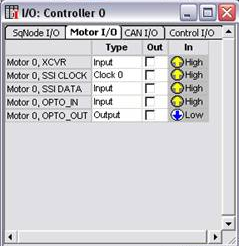
For other SSI compatible SynqNet devices, I/O configuration is located in Motion Console under the I/O Summary > Motor I/O tab. The I/O configuration for SqDC4 is shown below. SSI CLOCK (MEIMotorIoConfigIndex1) is used to drive the clock output and the serial input is decoded via SSI DATA (MEIMotorSsiInputGPIO_2).
See Also MEIMotorSsiInput | MEIMotorEncoderType | mpiMotorConfigSet | mpiMotorConfigGet Sample Application
|
|||||||||||||||||||||
| | | Copyright © 2001-2021 Motion Engineering |