|
|
| . |
|
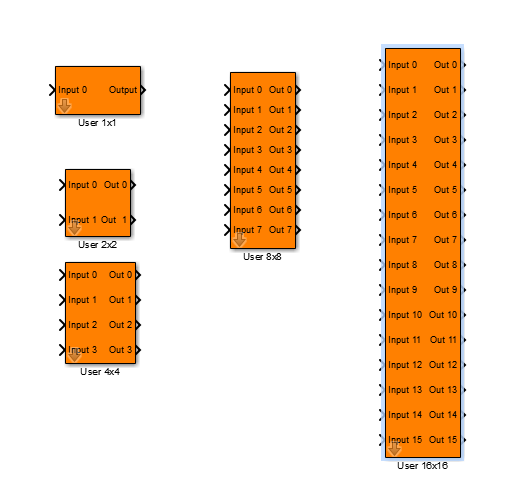
User OverviewOverviewThe User block is used to call a dynamically loaded function written by the user. The user block is a Multi Input Multi Output block (MIMO) . Block configurations currently supported are 1 x1, 2x2 4x4 8x8, and 16x16, Input x Output parameters addition, An array of Simulink-configurable coefficients are made available to the user function for which to base its calculations. The configuration values for this block are as follows:
Matlab/SimulinkSimulink Interface
The blocks have two user data fields (User Data 0, User Data 1) to store application-specific data for convenient storage and retrieval. For more information, see User Data Storage. The block's update schedule is determined by the Evaluate Block. The following Parameter Dialog Box can be opened by double-clicking on the block in a Simulink model: C++ APIUserBlockThere is no C++ API for this block.
|
||||||||||||||||
| | | Copyright © 2001-2012 Motion Engineering |