|
|
| . |
|
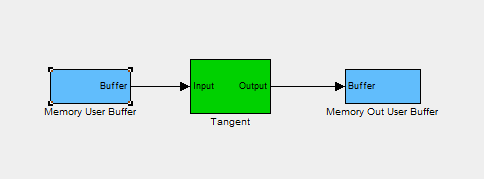
Tangent OverviewOverviewDescription The Tangent block computes the tangent of the input value. The units of the input value are radians. The Tangent is calculated at the update rate, determined by the Evaluate Block. Example
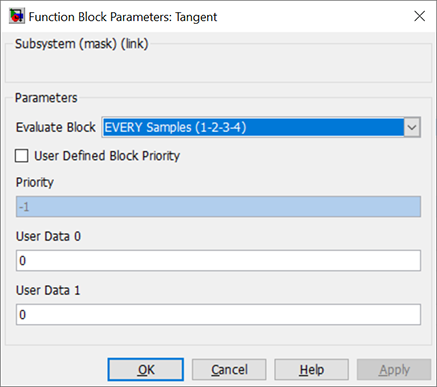
The configuration values for this blockare as follows:
Matlab/Simulink
C++ APITANBlockDeclaration Public Method
Description The Tangent block computes the tangent of the input. This block has no configurable parameters. Methods See Also Sine | Cosine | Arctangent See Also
|
||||||||||||||||||||||
| | | Copyright © 2001-2012 Motion Engineering |