|
|
| . |
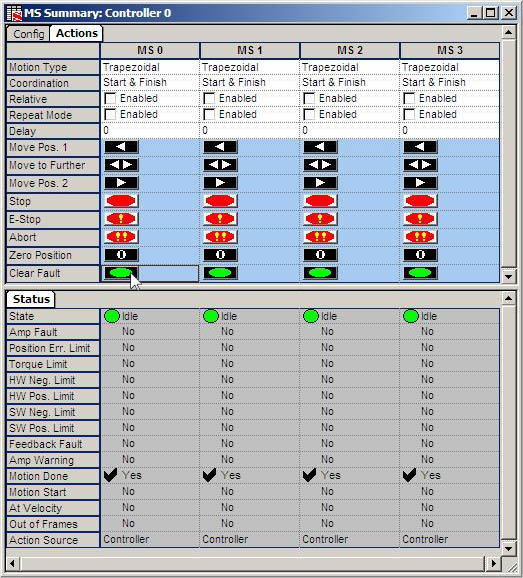
Tune the Servo Control LoopAfter verifying the hardware setup of the SynqNet Network using the various Motion Console Click on the Verify that the Motion Type is set to Trapezoidal under the Actions tab.
Click the Clear Fault button to dismiss any errors.
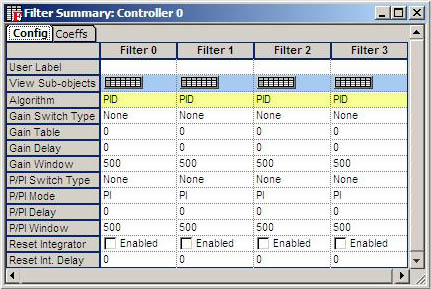
Click on the Verify that the Algorithm is set to PID under the Config tab.
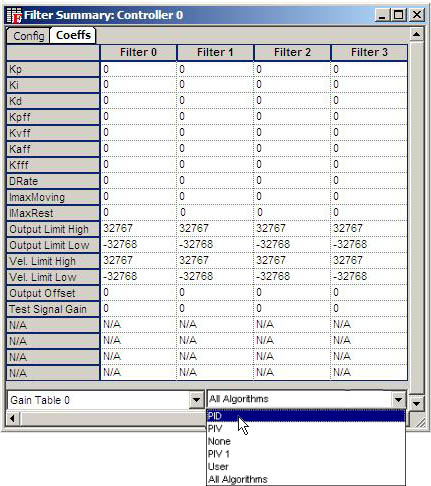
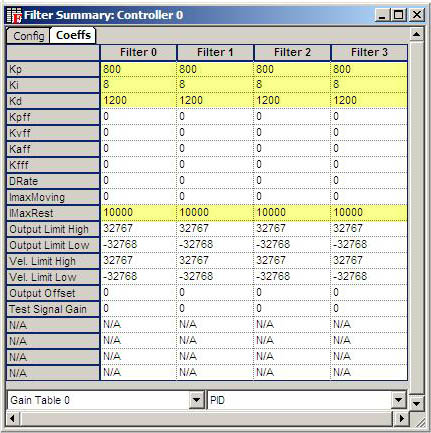
Go to the Coeffs tab and select PID from the Algorithm drop-down menu. WARNING! For our example we will use the following parameters:
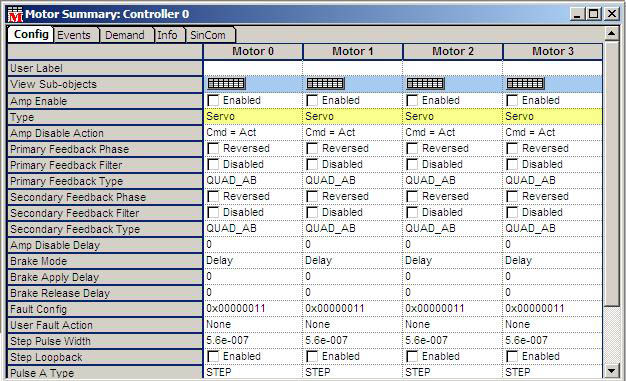
Click on the Verify that the motor Type is set to Servo under the Config tab.
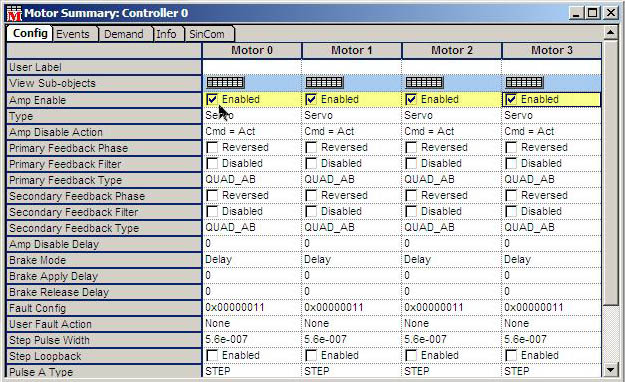
Set the Amp Enable checkbox to Enabled.
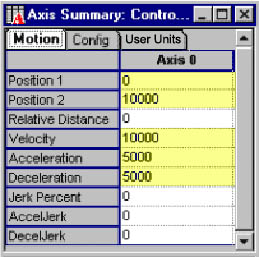
Click on the Under the Motion tab, enter the following parameters:
|
||||||||||
|
| | Copyright © 2001-2012 Motion Engineering |