
|
|
| . |
Shape-based Feedforward Tuning:
|
||||||||||||||||||||||||||||||||||||||
 |
||
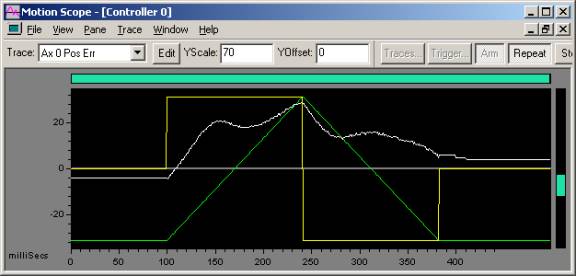
| 10,000 count move Trapezoidal move: 5e5 accel, decel, vel |
Green - Commanded Velocity Yellow - Commanded Acceleration White - Position Error |
|
|
||
When we zoom in on the error plot, we can see that there is a trend in the position error (white) that is similar in shape to the velocity plot (green). Since the position error and velocity plot are similar in sign (both have a positive peak), we will add Kvff. If the traces were opposite in polarity, we would reduce Kvff. Notice that the procedure that follows is virtually identical to the Kaff procedure.
 |
||
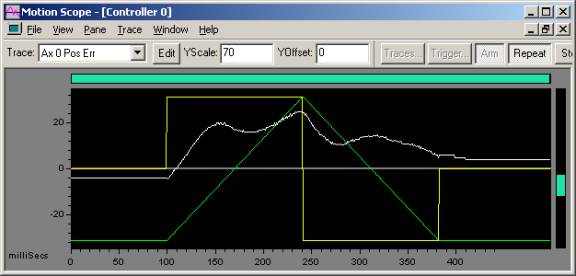
| 10,000 count move Trapezoidal move: 5e5 accel, decel, vel |
Green - Commanded Velocity Yellow - Commanded Acceleration White - Position Error |
|
|
||
 |
||
| 10,000 count move Trapezoidal move: 5e5 accel, decel, vel |
Green - Commanded Velocity Yellow - Commanded Acceleration White - Position Error |
|
|
||
|
|
||
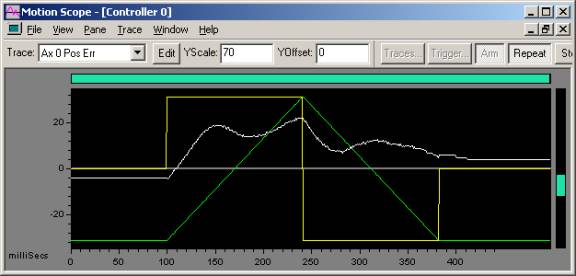
| 10,000 count move Trapezoidal move: 5e5 accel, decel, vel |
Green - Commanded Velocity Yellow - Commanded Acceleration White - Position Error |
|
|
||
Notice that there is not a noticable trend similar to the velocity plot at Kvfff = 40. There is a shift vertically that is constant for the entire motion in addition to some ringing on the transitions in acceleration and some Kaff error. At this point, we would call Kvff tuned. Remember that we are trying to get the velocity plot shape out of the position error plot, not going for absolute minimum position error peak.
After adjusting Kvff, you can see a small amount of position error pattern that looks like the acceleration pattern. It is common to first tune Kaff as best as possible and then Kvff, only to find that some small error in your Kaff tuning that you can only see after tuning Kvff. Just go back and fine tune your original Kaff tuning now that you can see the pattern more clearly.
| | | Copyright © 2001-2021 Motion Engineering |
