
|
|
| . |
Shape-based Feedforward Tuning:
|
||||||||||||||||||||||||||
 Positive Direction |
 Negative Direction |
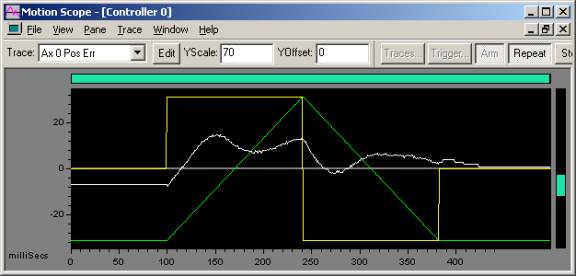
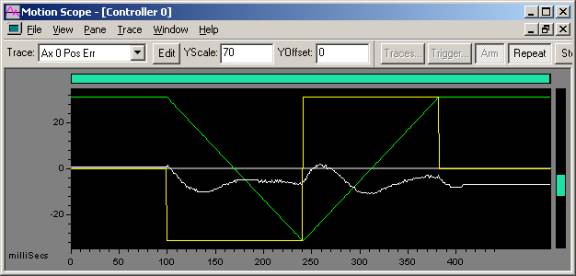
If we make Kfff = 500, the resulting profile almost looks right. Notice that the position error is split between the zero position error line. The split comes from some error in the Kaff term that we will clean up in the next section.
 |
||
| 10,000 count move Trapezoidal move: 5e5 accel, decel, vel |
Green - Commanded Velocity Yellow - Commanded Acceleration White - Position Error |
|
|
||
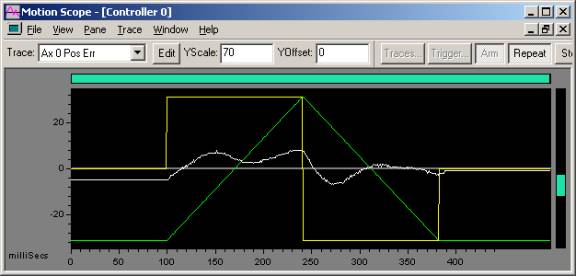
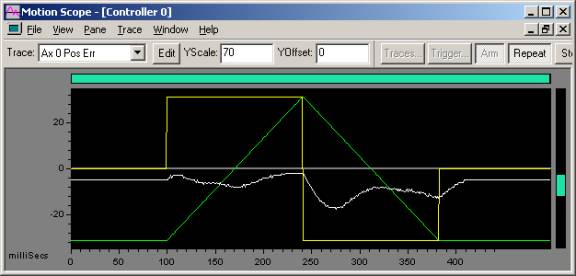
Since Kfff is constantly affecting the entire move, you will only be able to see the problems at the beginning and end of the move. Note that the position error appears to "snap in" at the end of the move, which comes from an excessive Kfff being removed at the end of the move.
NOTE: Kfff is 3x the ideal value in the following example.
 |
||
| 10,000 count move Trapezoidal move: 5e5 accel, decel, vel |
Green - Commanded Velocity Yellow - Commanded Acceleration White - Position Error |
|
|
||
| | | Copyright © 2001-2021 Motion Engineering |
