
|
|
| . |
Shape-based Feedforward Tuning:
|
|||||||||||||||||||||||||
 |
||
| 10,000 count move Trapezoidal move: 5e5 accel, decel, vel |
Green - Commanded Velocity Yellow - Commanded Acceleration White - Position Error |
|
|
||
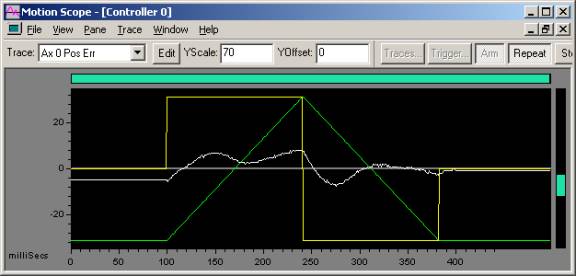
After you have adjusted Kaff, Kvff, and Kfff, you may notice some slight errors that were not as evident before. This is particularly normal if you started with a large position error peak. In our example, the original peak position error = 187 counts before we adjusted Kaff.
Now that our peak position error is around 7 counts, some slight errors are now visible. We will now attempt to resolve these few remaining errors and lower our peak position error even more.
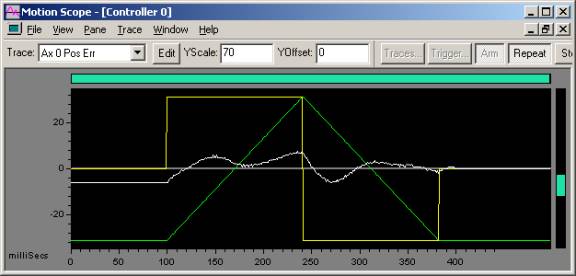
First, let's adjust Kaff. Make Kaff = 101,000.
 |
||
| 10,000 count move Trapezoidal move: 5e5 accel, decel, vel |
Green - Commanded Velocity Yellow - Commanded Acceleration White - Position Error |
|
|
||
As you can see, the peak position error is a bit lower now.
In order to visually see how much we were able to reduce the position error by using Shape-based Feedforward Tuning, look at the Before and After plots of our data using the same YScale.
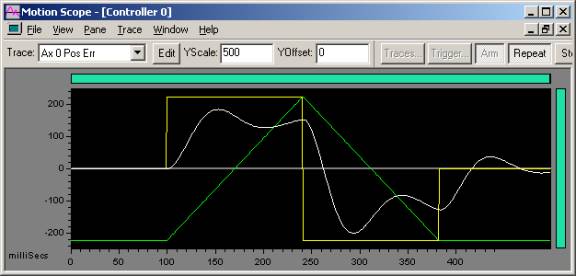 Before Kaff = 0 Kvff = 0 Kfff = 0 |
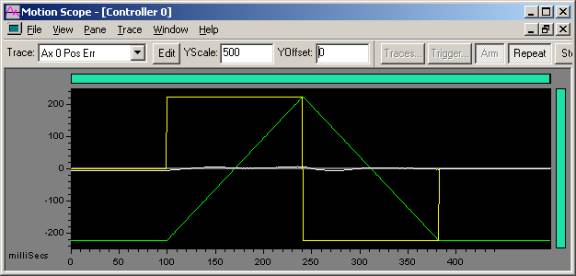 After Kaff = 101,000 Kvff = 40 Kfff = 500 |
| | | Copyright © 2001-2021 Motion Engineering |
