|
|
| . |
What is Ka1?Ka1 is a low pass filter applied to the actual velocity that results in the velocity estimate. The velocity estimate must be based off of the actual velocity. When the actual velocity plot is filtered, the actual velocity and velocity estimate are different. Ka1 is a value that ranges from 0 to less than 1. DO NOT enter a value that is outside of this range. Zero corresponds to no filtering (velocity estimate is equal to the actual velocity). The corner frequency of the low pass filter is reduced as Ka1 increases. DO NOT let Ka1 increase until it is a DC filter (Ka1 = 1). Let's try changing Ka1 to see the effects it has on the velocity estimate:
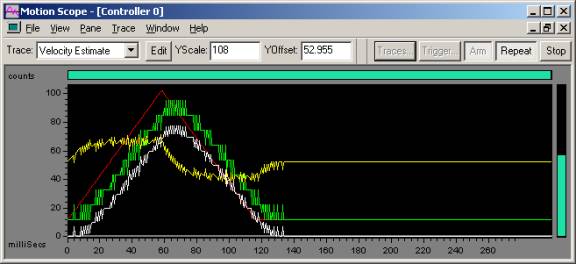
We can see a small amount of smoothing on the velocity estimate (white) as compared to the actual velocty (green). It is easier to see the difference on the velocity error (DAC). In addition, there was a dramatic decrease in audible noise. As there is no noise to speak of on the commanded velocity, all the noise reduction comes from the velocity estimate. Let's try increasing Ka1 to 0.6:
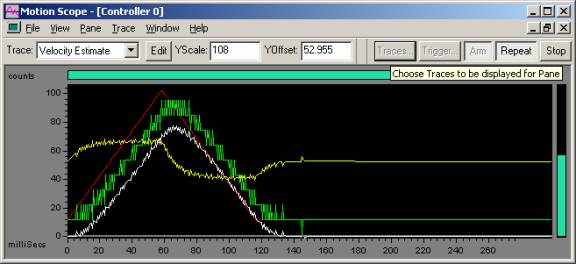
Further decrease in noise is evident by changing to Ka1 = 0.6. Audible noise is decreased so it is just barely audible. Notice the smoothness on the velocity error (DAC). Let's increase Ka1 to 0.9:
Another increase in velocity estimate smoothness is obvious. A phase lag is starting to be apparent. Notice how the velocity estimate is shifting to the right compared to the actual velocity. Since the velocity estimate is based on the actual velocity, this can be troubling. Let's turn up Ka1 more and make it really obvious:
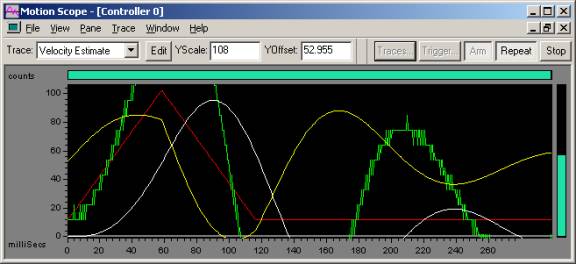
At this point, we have not made a meaningful increase in velocity estimate smoothness, but have made a meaningful phase lag in the velocity estimate (bad). Some overshoot in the velocity error is becoming apparent. Notice that the peak actual velocity exceeds the peak commanded velocity. We don't want much overshoot in the velocity estimate. Just to give some incentive to not go too far with Ka1, let's turn it up way too far:
|
|||||||||||||||||
| | | Copyright © 2001-2021 Motion Engineering |