|
|
| . |
Controller LEDsSynqNet
| CAN SynqNetSynqNet controller LEDs will BLINK to indicate a fault (or undiscovered network). A controller with no blinking LEDs is in normal cyclic operation (without faults). Each SynqNet port has two LEDs. And each LED has a particular function, which is described in further detail below. Each controller will have four green LEDs:
LED State
Table: SynqNet
LED1 and LED3 = Link Activity
LED2 and LED4 = Network Activity
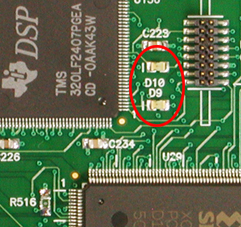
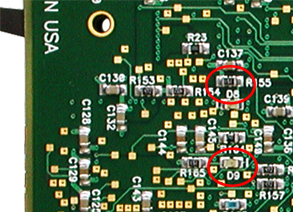
CANThe XMP-CAN controllers have two green LEDs. These LEDs give a visual representation of the activity on the CAN network. The locations of the LEDs vary depending on the type of XMP-CAN controller. The photos and table below show the locations and meanings of each LED.
LED State
Table: CAN
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| | | Copyright © 2001-2021 Motion Engineering |