|
|
| . |
PIV Tuning:
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
||
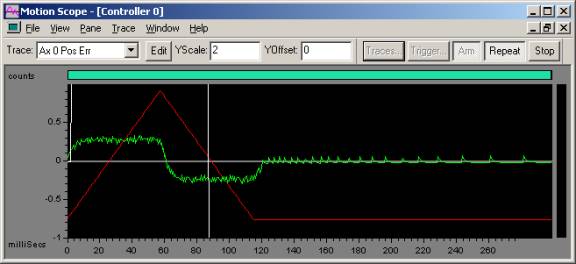
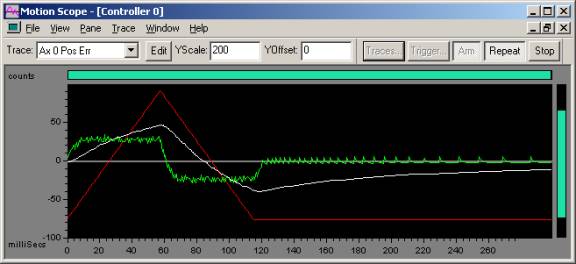
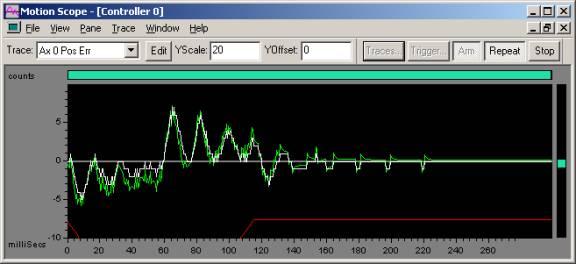
| 1,000 count move 50,000 count / sec velocity 300,000 count / sec2 accel / decel |
Red - Commanded Velocity Green - Actual Velocity White - DAC Output |
|
|
||
You can see that the position error plot goes off scale because we have not set the scaling yet. Adjust the Y Scale until you get the view you want.
 |
||
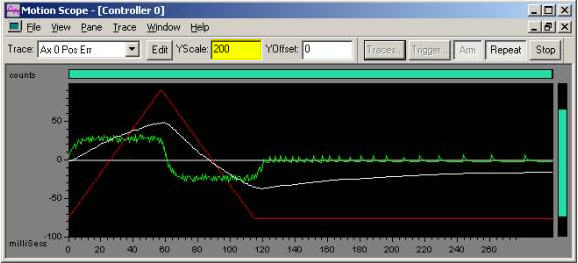
| 1,000 count move 50,000 count / sec velocity 300,000 count / sec2 accel / decel |
Red - Commanded Velocity Green - Actual Velocity White - DAC Output |
|
|
||
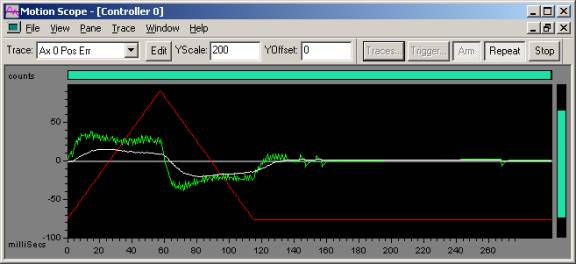
We will turn up Kpp until we see overshoot on the position error that is acceptable or see other unacceptable behavior (noise). Turn up Kpp in increments (~200%) until you find this limit. The following figures show the progress from a very small Kpp (0.001) to the Kpp value where instability sets in (0.4). At that point, turn down Kpp for a margin of stability.
 |
||
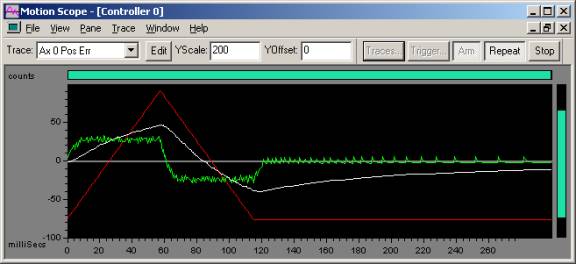
| 1,000 count move 50,000 count / sec velocity 300,000 count / sec2 accel / decel |
Red - Commanded Velocity Green - Actual Velocity White - DAC Output |
|
|
||
 |
||
| 1,000 count move 50,000 count / sec velocity 300,000 count / sec2 accel / decel |
Red - Commanded Velocity Green - Actual Velocity White - DAC Output |
|
|
||
 |
||
| 1,000 count move 50,000 count / sec velocity 300,000 count / sec2 accel / decel |
Red - Commanded Velocity Green - Actual Velocity White - DAC Output |
|
|
||
 |
||
| 1,000 count move 50,000 count / sec velocity 300,000 count / sec2 accel / decel |
Red - Commanded Velocity Green - Actual Velocity White - DAC Output |
|
|
||
 |
||
| 1,000 count move 50,000 count / sec velocity 300,000 count / sec2 accel / decel |
Red - Commanded Velocity Green - Actual Velocity White - DAC Output |
|
|
||
 |
||
| 1,000 count move 50,000 count / sec velocity 300,000 count / sec2 accel / decel |
Red - Commanded Velocity Green - Actual Velocity White - DAC Output |
|
|
||
Note the change in scale.
 |
||
| 1,000 count move 50,000 count / sec velocity 300,000 count / sec2 accel / decel |
Red - Commanded Velocity Green - Actual Velocity White - DAC Output |
|
|
||
Since we are starting to see some oscillation on the position error plot, we will make smaller jumps in Kpp (50%).
 |
||
| 1,000 count move 50,000 count / sec velocity 300,000 count / sec2 accel / decel |
Red - Commanded Velocity Green - Actual Velocity White - DAC Output |
|
|
||
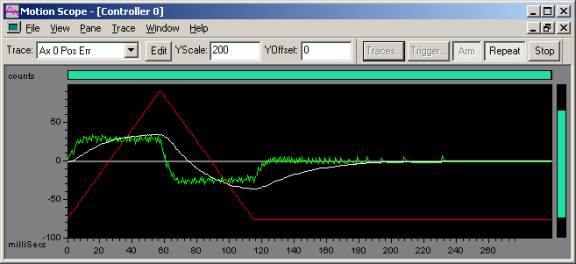
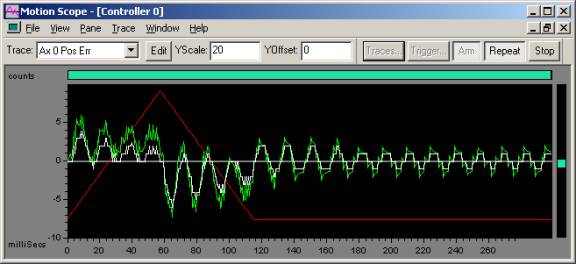
We are getting to be on the verge of instability judging from the increase in position error ringing. We will turn up gain until we see instability. Let's cut to the chase and see the limiting value.
 |
||
| 1,000 count move 50,000 count / sec velocity 300,000 count / sec2 accel / decel |
Red - Commanded Velocity Green - Actual Velocity White - DAC Output |
|
|
||
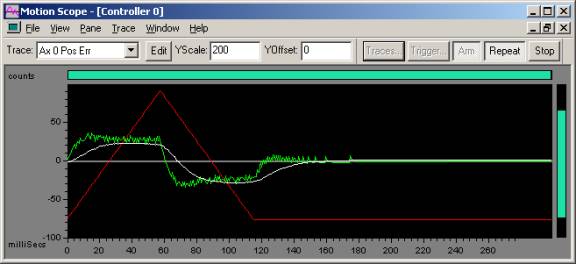
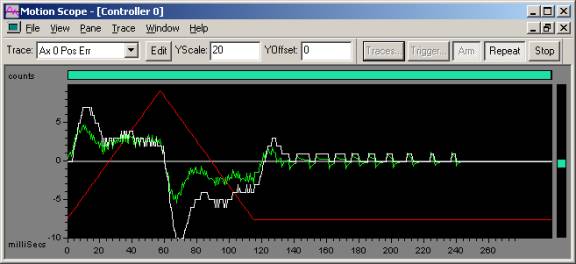
Now that we have the limiting value, turn it down by 2/3.
 |
||
| 1,000 count move 50,000 count / sec velocity 300,000 count / sec2 accel / decel |
Red - Commanded Velocity Green - Actual Velocity White - DAC Output |
|
|
||
Previous | Back to Table of Contents
| | | Copyright © 2001-2021 Motion Engineering |