|
|
| . |
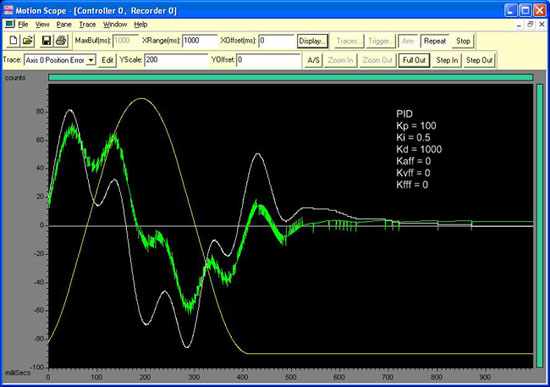
Converting PID Parameters to PIV ParametersThis section describes how to convert PID parameters to PIV parameters. Note two PIV conversion methods (examples A, B) are described below depending on what type of PIV you want to convert to. For this scenario, the following PID is used with the same move for examples A and B.
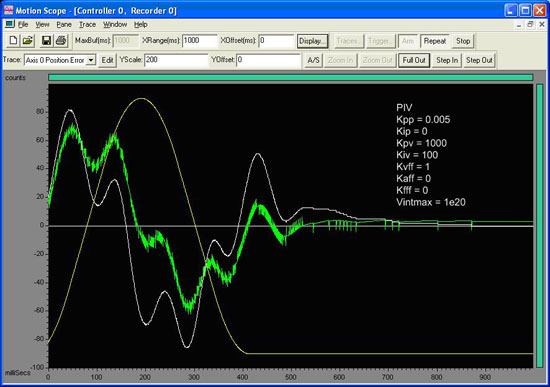
PIV Conversion Method Kpv, Kiv, Kpp (Example A)The parameters for example A were calculated based on the equations from the PID parameters above. Note traces are displayed in white following error, commanded torque in green, and commanded velocity in yellow.
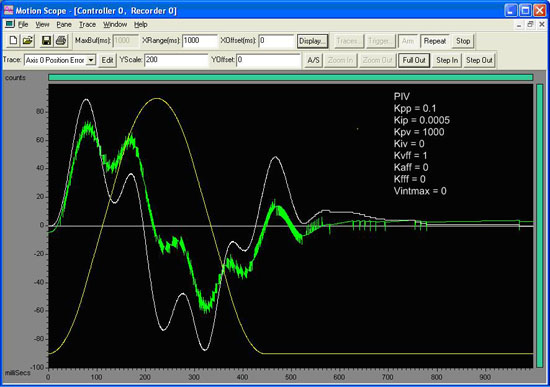
For example A, the PID and equivalent PIV parameters (PID = PIV) are provided below for the conversion method Kpv, Kiv, Kpp: Kd = Kpv PIV Conversion Method Kpv, Kpp, Kip (Example B)The parameters for example B were calculated based on the equations from the PID parameters above. Note traces are displayed in white following error, commanded torque in green, and commanded velocity in yellow.
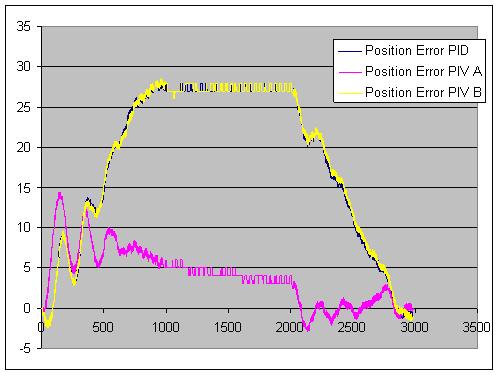
For example B, the PID and equivalent PIV parameters (PID = PIV) are provided below for the conversion method Kpv, Kpp, Kip: Kd = Kpv Constant Velocity ErrorConstant velocity errors can occur during longer moves. The following chart is provided to show the constant velocity errors for all three tuning algorithms. Note the position error for PID and PIV (example B) are essentially the same, meaning PID and PIV (example B) are proportional to velocity and can use the same Kvff value interchangeably. PIV (example A) does not respond to Kvff adjustment resulting in a trajectory scaling problem. Kvff in PIV (example A) should always be set to 1 on systems with encoders of the same resolution.
|
| | | Copyright © 2001-2021 Motion Engineering |